电子齿轮比设定
DMC-4080运动控制器以脉冲指令的形式向驱动器发送命令,进而控制机床运动。一个脉冲使机床运动轴移动的距离称为指令单位。电子齿轮比是伺服驱动器普遍拥有的功能,通过电子齿轮比的设定,伺服驱动器能够把上位控制器发送的一个脉冲转换为机床运动轴的移动量。也就是说通过驱动器上的电子齿轮比可以设定实际需要的指令单位。 按照图2.5的机械结构,以使运动轴移动10mm为例,比较不使用和使用电子齿轮时的区别。 不使用电子齿轮时: (1)计算转动圈数:电机每1圈转动6mm,因此将工件移动10mm时,转动圈数为10/6圈; (2)计算所需的指令脉冲数:16777216个脉冲为1圈,因此,所需脉冲数为“10/6X16777216=27962026.66…个脉冲”; (3)输入27962027个脉冲的指令。 使用电子齿轮时: 以1 μm为指令单位,即每1个脉冲的移动量为1 μm。需移动10mm(10000μm)时,"10000÷1=10000个脉冲”,因此输入10000个脉冲。 经上述比较看出,不使用电子齿轮时每发送不同指令都需在上位机中分别计算指令脉冲数,使得编程操作过于繁琐;使用电子齿轮时无需根据不同指令分别计算指令脉冲数,只需根据需要的指令单位计算出对应的电子齿轮比,并通过伺服驱动器的参数Pn20E和Pn210分别设定电子齿轮比分子分母即可。电子齿轮比的值可通过下式求得。
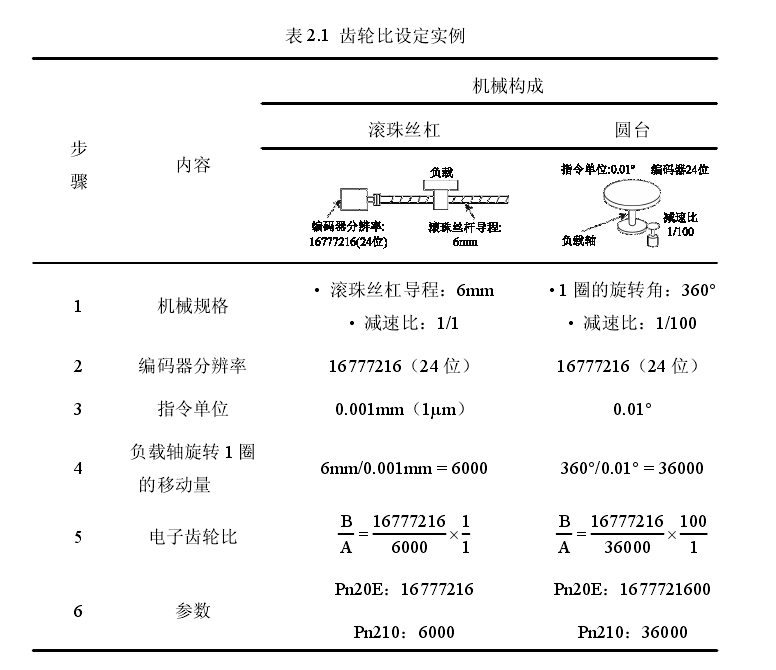
其中,B为电子齿轮比的分子即参数Pn20E应设定的值,A为电子齿轮比的分母即参数Pn210应设定的值,PG为电机编码器分辨率,Pd为运动轴的滚珠丝杠导程,△l为指令单位。m/n为电机轴和负载侧的机器减速比(即电机旋转m圈时负载轴旋转n圈)。 电子齿轮比的设定实例如表2.1所示。


 首页
首页
 产品中心
产品中心
 电话咨询
电话咨询
 售后服务
售后服务 售前服务
售前服务 关注公众号
关注公众号